Using rqt Tools for Analysis¶
In this exercise we will use rqt_console, rqt_graph and urdf_to_graphviz to understand behavior of the ROS system.
Motivation¶
When complicated multi-node ros systems are running it can be important to understand the interactions of nodes.
Information and Resources¶
Problem Statement¶
The Scan-N-Plan application is complete. We would like to further inspect the application using the various ROS rqt tools.
Guidance¶
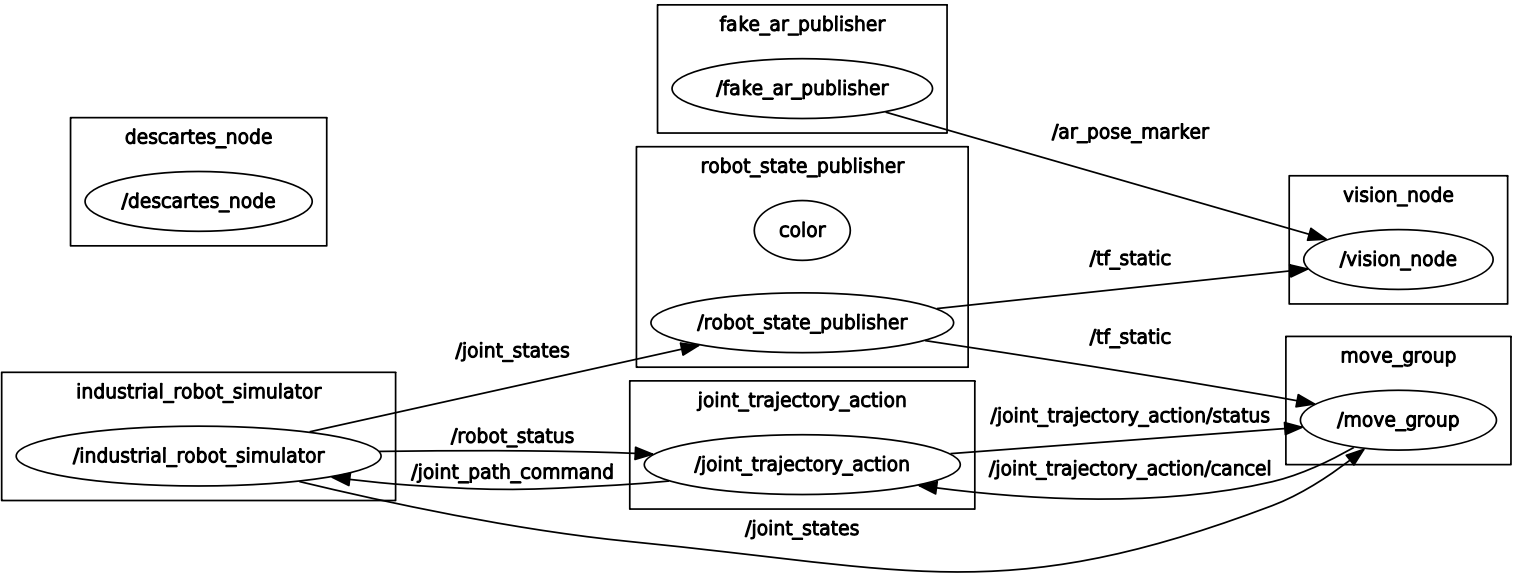
rqt_graph: view node interaction¶
In complex applications, it may be helpful to get a visual representation of the ROS node interactions.
- Launch the Scan-N-Plan workcell:
roslaunch myworkcell_support setup.launch
- In a 2nd terminal, launch the rqt_graph:
rqt_graph
- Here we can see the basic layout of our Scan-N-Plan application:
- In a 3rd terminal, launch the descartes path planner.:
rosrun myworkcell_core myworkcell_node
- You must update the graph while the node is running because the graph will not update automatically. After the update, we see our updated ROS network contains out myworkcell_node. Also, The myworkcell_node is publishing a new topic
/move_group/goalwhich is subscribed by the move_group node.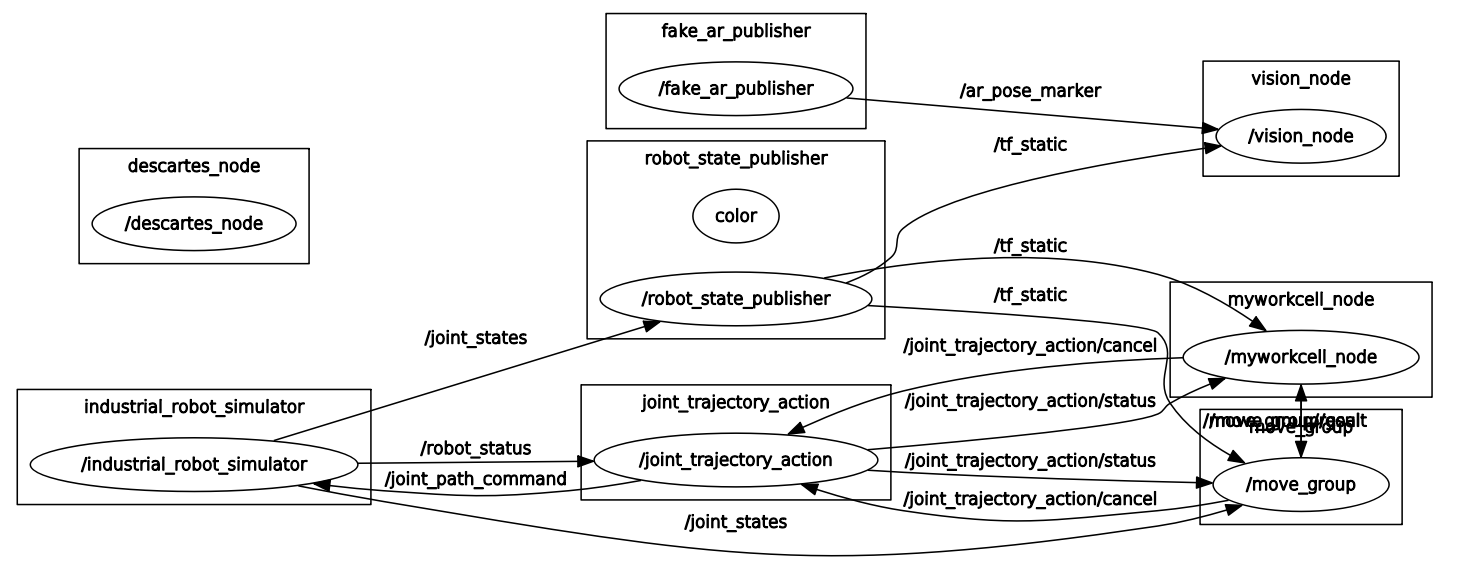
rqt_console: view messages:¶
Now, we would like to see the output of the path planner. rqt_console is a great gui for viewing ROS topics.
- Kill the rqt_graph application in the 2nd terminal and run rqt_console:
rqt_console
- Run the path planner:
rosrun myworkcell_core myworkcell_node
- The rqt_console automatically updates, showing the logic behind the path planner:

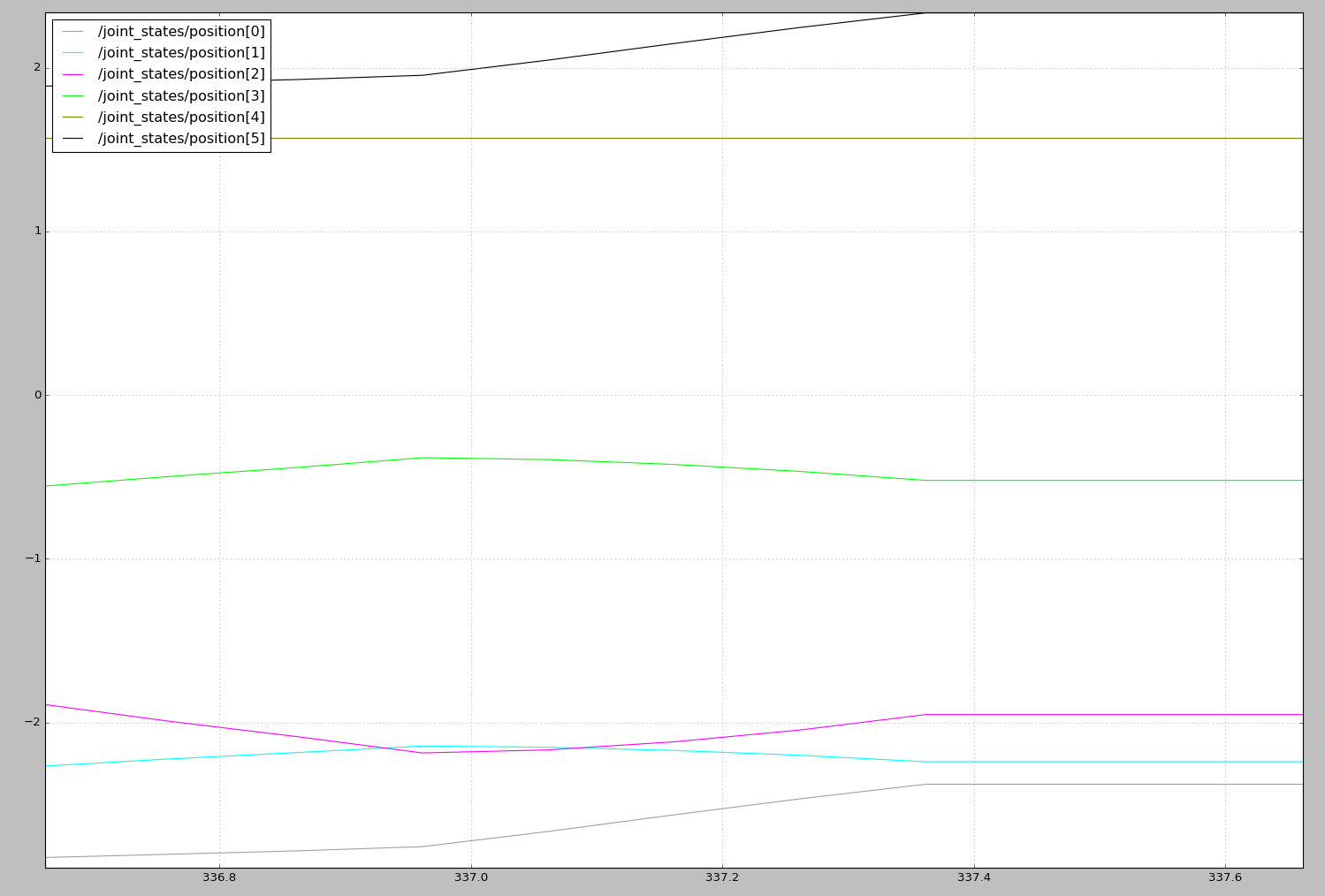
rqt_plot: view data plots¶
rqt_plot is an easy way to plot ROS data in real time. In this example, we will plot robot joint velocities from our path plan.
- Kill the rqt_console application in the 2nd terminal and run rqt_plot:
rqt_plot
- In the
Topicfield add the following topics:
/joint_states/position[0]
/joint_states/position[1]
/joint_states/position[2]
/joint_states/position[3]
/joint_states/position[4]
/joint_states/position[5]
- Then run the path planner:
rosrun myworkcell_core myworkcell_node
- We can see the joint positions streaming in real-time: